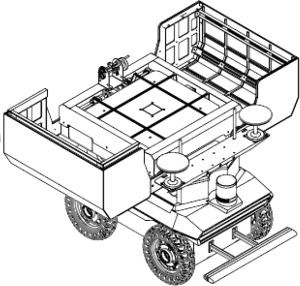
该 空 地 一 体 化 技 术 应 用 平 台 , 整 套 底 盘 采 用 了 四 轮 差 速 结 构 , 空 地 一 体 化 技 术 应 用 平 台 适 配 4 套 直 流 无 刷 伺 服 电 机 , 四 个 轮 子 均 可 以 独 立 控 制 速 度 。 整 车VCU 基 于ARM 的 控 制 板 , 不 但 可 以 控 制 车 辆 运 动 行 驶 , 还 能 直 接 反 馈 各 个 轮 子 速 度 , 电 量 电 压 和 相 关 的 车 辆 状 态 。 通 用 导 航 机 器 人 支 持 巡 航 点 设 置 和 绘 制 功 能 、 轨 道 点 设 置 功 能 和 轨 迹 录 制 功 能 、 激 光 末 端 定 位 功 能 、 自 动 回 充 功 能 以 及 高 精 度 地 图 建 立 ( 包 含 增 量 地 图 功 能 ) 等 。 支 持RTK 室 外 导 航 模 式 , 通 过RTK 导 航 实 现 室 外 精 确 引 导 。